

MECHATROLINK-4 란
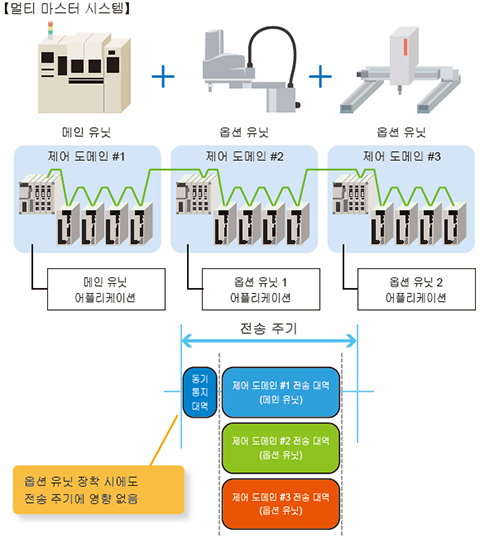
MECHATROLINK-4에서는 통신 설정에 의해 제어 도메인 내의 제어 전송을 같은 시각에 병렬로 전송할 수도 있습니다.
※네트워크에 연결되는 컨트롤러, PLC 등을 'Main Device[약칭: MDevice]', 서보 드라이브, 인버터, I/O 기기 등을 'Subordinate Device[약칭: SDevice]'라고 부릅니다.
특징
(1) 통신 순서의 효율화
MECHATROLINK-4는 통신 방식을 반이중 통신에서 전이중 통신으로 전환하여 전송 효율을 큰 폭으로 향상하였기 때문에 장치의 고성능화와 고기능화를 지원할 수 있습니다.
- 제어 성능 향상: 동일 대수가 있으면 전송 주기를 기존 대비 약 1/4로 단축할 수 있을 뿐만 아니라 더 섬세한 제어가 가능합니다.
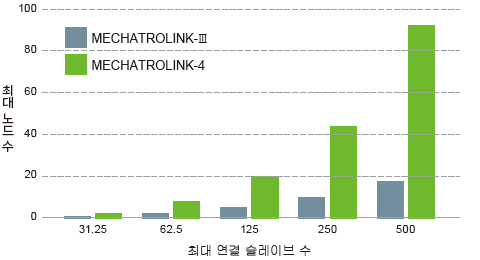
- 시스템(장치)의 대규모화 지원: 동일 전송 주기로 연결 가능한 SDevice 기기의 대수는 MECHATROLINK-Ⅲ의 약 4배가 됩니다.
- 전송 주기를 설정한 후 빈 시간을 IP 통신, 메시지 통신, 재시도 통신에 활용할 수도 있습니다.
(2) 복수 전송 주기 기능
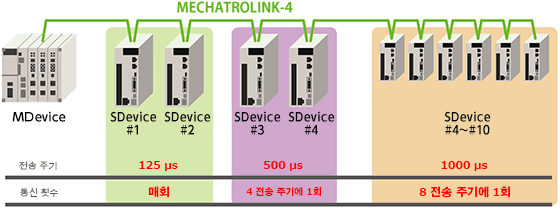
MECHATROLINK-4는 SDevice마다 서로 다른 주기를 설정할 수 있습니다. 동일 네트워크상에서 여러 개의 전송 주기 데이터가 존재하므로 각 SDevice 기기를 최적의 전송 주기로 제어할 수 있습니다.
- 빠른 전송 주기와 느린 전송 주기를 동일 네트워크상에 설정할 수 있습니다.
- 빠른 주기 제어가 필요 없는 I/O 기기에서도 통신의 부하를 증가시키지 않고 고속화된 네트워크에 연결할 수 있습니다.
- 느린 주기로 통신하는 SDevice 기기의 통신 타이밍을 분산시킴으로써 더 많은 기기를 연결할 수 있습니다.
- 각 SDevice별로 최적의 전송 주기를 설정하면 컨트롤러 프로그램의 효율을 향상할 수 있습니다.
(3) 멀티 MDevice 기능
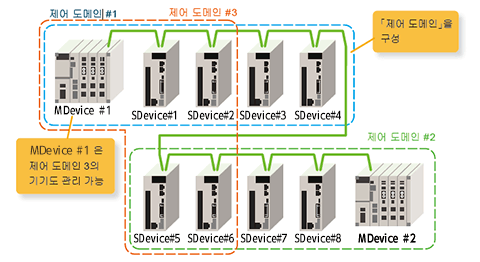
MECHATROLINK-4는 동일 네트워크상에 여러 개의 MDevice(최대 8)가 존재하는 시스템을 구성할 수 있습니다.
멀티 태스크 기능을 활용하여 장치의 성능 향상, Safety 시스템을 지원할 수 있습니다.
- 각 MDevice 와 그 제어 하에 있는 SDevice는「 제어 도메인 」이라 불리는 논리적 그룹을 구축합니다.
- 하나의 MDevice는 여러 개의 제어 도메인을 관리할 수 있습니다.
- SDevice는 여러 개의 제어 도메인에 소속될 수 있습니다.
- 통신 설정에 의해 제어 도메인 내의 제어 전송을 같은 시각에 병렬로 전송할 수도 있습니다.(병렬 전송)
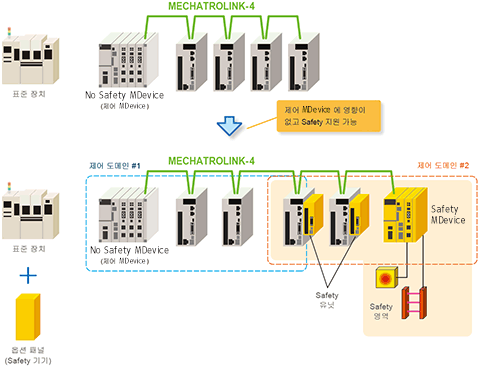
(4) Safety 시스템 대응
MECHATROLINK-4에서는 멀티 태크스 기능을 이용하여 Safety 시스템을 지원할 수 있습니다. (인증 예정)
(5) Ethernet 기기와의 연결
MECHATROLINK-4는 Ethernet 기기를 다이렉트로 연결할 수 있습니다. 전송 효율 향상을 통해 확보된 전송 주기 내의 빈 대역을 IP 통신 대역으로 사용합니다. 사용할 IP 통신 대역은 제어 전송에 영향을 미치지 않습니다. IP 통신을 사용하면 직접 PC와 엔지니어링 툴을 연결할 수 있게 되고 각종 파라미터 설정과 데이터 읽고 쓰기가 가능해집니다.