

MECHATROLINK-4とは
MECHATROLINK-4 は従来のMECHATROLINK-Ⅲの持つ高機能・高性能・高信頼性と使いやすさを、互換性を維持し、同一条件で約4 倍の性能向上を実現しています。従来にない新しい仕様を盛り込んだ新世代のモーションフィールドネットワークとなっています。
※ネットワークに接続されるコントローラ、PLCなどを「Main Device [略:MDevice]」、サーボドライブ、インバータ、I/O機器などをSubordinate Device [略:SDevice]と呼びます。
特長
(1) 通信手順の効率化
MECHATROLINK-4 では、全二重通信に切り替えることで伝送効率を大幅に向上し、装置の高性能化や高機能化に対応できます。
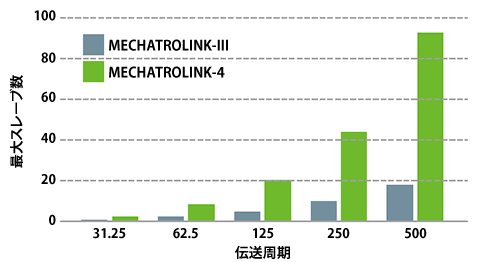
- 制御性能の向上:同一台数であれば伝送周期を従来比の約4 分の1 に短縮し、より細かい制御が可能。
- システム(装置)の大規模化に対応:同一伝送周期に接続可能なSDevice機器の台数はMECHATROLINK-Ⅲの約4 倍。
- 伝送周期を据え置いて空いた通信時間をIP 通信、メッセージ通信、リトライ通信に活用可能。
(2) 伝送周期の最適化
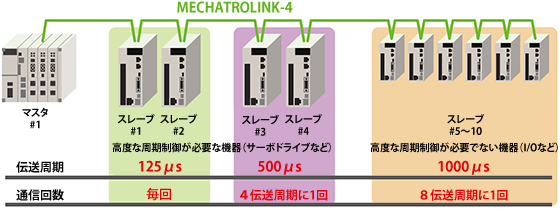
MECHATROLINK-4 は、SDevice毎に異なる周期設定が可能です。
同一ネットワーク上に複数の伝送周期を存在させ、各SDevice機器を最適な伝送周期で制御することが出来ます。
- 速い伝送周期と遅い伝送周期を同一ネットワーク上に設定可能。
- 速い周期制御が必要でないI/O機器でも、通信の負荷を増やさずに高速化されたネットワークに接続可能。
- 遅い周期で通信するSDevice機器の通信タイミングを分散させることで、より多くの機器を接続可能。
- SDevice毎に最適な伝送周期を設定することで、コントローラのプログラムの効率化が可能。
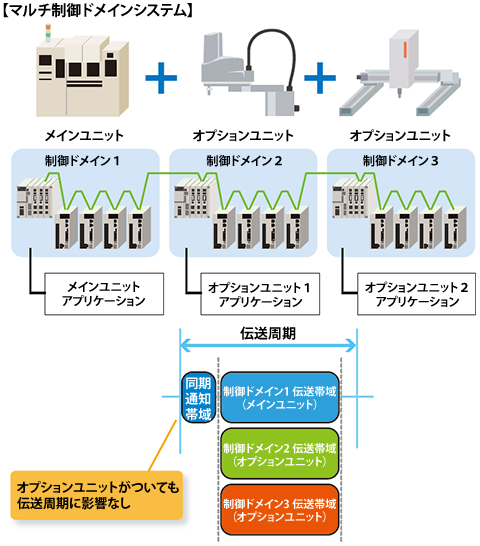
(3) マルチ制御ドメインシステム
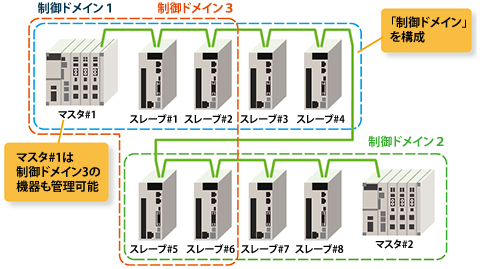
同一ネットワーク上に複数のMDevice(最大8局)が存在するシステム構成が可能です。
このマルチ制御ドメインシステム構成を活用することで、装置のパフォーマンス向上への対応を行うことができます。
- 各MDeviceとその制御下のSDeviceは、「制御ドメイン」と呼ばれる論理的なグループを構成。
- 一つのMDeviceは複数の制御ドメインを管理することが可能。
- SDeviceは複数の制御ドメインに所属することが可能。
- 複数の制御ドメイン内の制御伝送を同時刻に実行可能。(並列なI/O伝送)
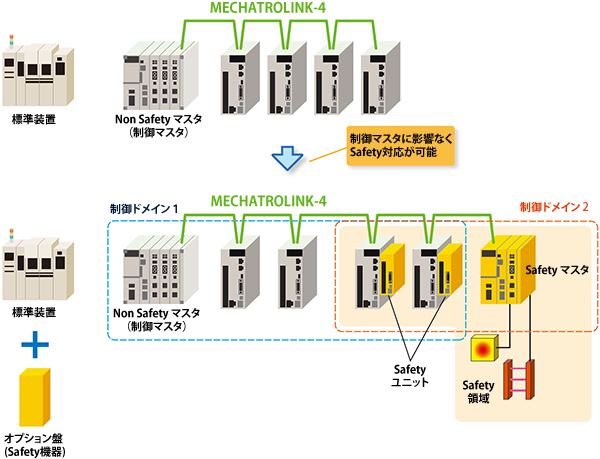
(4) Safety システム対応
マルチ制御ドメインシステム構成を活用することでSafety システムへの対応が可能となります。(将来)
(5) Ethernet 機器との接続
MECHATROLINK-4は、Ethernet 機器をダイレクトに接続できます。
伝送効率の向上によりできた伝送周期内の空き帯域を、IP 通信帯域として使用します。
使用するIP通信帯域は制御伝送に影響を与えません。